El campo de la robótica nunca deja de sorprendernos, y es que durante los últimos meses hemos visto todo tipo de innovaciones relacionadas con este ámbito. Robots camarero, robots “profesores”, o incluso robots perro, son algunos de los autómatas que han llegado a nuestros oídos recientemente, pero esto solo es el principio.
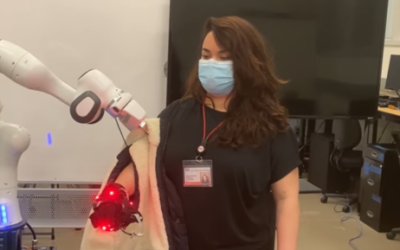
La última novedad en el ámbito de la robótica ha venido de la mano de la Universidad de Carnegie Mellon y Facebook AI Research. Se trata de un robot capaz de desplazarse por espacios tras hacer un rápido reconocimiento en el que identifica los objetos y obstáculos que se encuentran en ese espacio.
Sin embargo, esta no es la primera vez que Facebook nos trae una creación de este tipo. Este mismo año, pudimos ver un robot desarrollado por la compañía que era capaz de desplazarse por un edificio sin necesidad de utilizar ningún tipo de mapa ni GPS (dado que tenía la capacidad para reconocer cada espacio y los objetos que se encontraban en él).
Pero… ¿En qué consiste realmente?
La idea es que este robot pueda comprender en qué espacio es más probable que se encuentre un objeto concreto. Por ejemplo, en el caso de estar en una casa, el robot debería ser capaz de diferenciar una mesa de comedor de una mesilla de noche, de manera que este se desplace hacia un dormitorio en caso de estar “buscando” la mesilla.
Para lograr esto, el equipo de expertos ha entrenado al robot mediante Inteligencia Artificial, de manera que este sea capaz de identificar los objetos que encuentra a su paso, y no los considere meros obstáculos en el camino. Posteriormente, el robot almacena en su sistema el lugar donde sería “normal” encontrar dicho objeto en específico.
Según sus creadores, este enfoque permite que el robot sea capaz de desplazarse de una forma más precisa y eficiente. Esto se debe a que un robot convencional también es capaz de reconocer y encontrar un objeto concreto, pero jamás de una manera tan rápida y sencilla como lo haría un robot que emplea esta tecnología.
La utilidad de todo esto reside en la posibilidad de desarrollar robots con un nivel de interacción con humanos muy superior. En otras palabras, si queremos que nuestro robot nos acerque un libro que hay en la mesa del salón, bastará con decírselo, en lugar de crear comandos complejos que nos permitan programarlo para dicha función en concreto.